基于強化學習的雷達干擾決策技術研究與系統實現
本文是一篇決策模擬論文,本篇文章以強化學習為理論基礎,探討了對抗多功能雷達場景下的智能干擾決策技術。
第1章 緒論
1.1 研究背景和意義
隨著現代戰爭呈現出電磁環境日益復雜、目標環境更加多樣、背景情況不斷變化等顯著特征,電子戰在激烈的演變競爭中嶄露頭角[1]。在電子戰這一充滿高科技含量的戰場上,雷達所發揮的作用極為關鍵,承擔著精確測量、實時信號偵察、干擾以及防御等一系列核心任務。當面對來自雷達的威脅時,實施對抗的一方需要借助干擾技術,以此來中斷目標偵察信息的獲取過程,同時瓦解雷達的作戰策略,為己方在干擾行動中贏得勝利創造堅實條件。在2022年爆發的俄烏沖突當中,俄羅斯軍隊的飛機配備了多種電子戰裝備,像莫斯科-1、克拉蘇哈-4、摩爾曼斯克-BN等,這些裝備給烏克蘭的無人機以及地面防空通信系統給予了相當大程度的破壞[2]。在電子對抗這個特定領域內,雷達干擾技術所占據的地位十分關鍵。
隨著硬件設備不斷地更新換代,軟件算法也逐漸趨向完善,在這樣的背景下,雷達技術取得了較大的發展,實現了從以往傳統的單一模式向復合型智能系統的大步跨越。當下那些較為先進的雷達系統具備很強的靈活性,不但能夠對波形參數加以調整,而且還能對工作頻段進行靈活變動,除此之外,還可以憑借多維信號處理技術,較為有效地去應對復雜戰場環境里面存在的電磁干擾相關問題[3]。就在這樣的情形之下,人工智能被廣泛且深入地應用起來,而這也正促使著軍事裝備朝著自主決策的方向不斷演進發展。新一代的雷達裝備在努力提升自身動態部署能力的同時,也在不斷增強環境適應性,并且還頗具創新性地參考借鑒了生物系統所具備的學習機制,把環境感知功能以及智能決策功能緊密地結合到了一起。正是這樣的技術層面的突破,使得裝備在多層次的攻防對抗過程當中,能夠展現出頗為顯著的戰術效能,這無疑極大地增加了敵方在實施有效電子對抗之時進行決策的難度。
決策模擬論文怎么寫
....................
1.2 國內外相關研究進展
1.2.1 雷達干擾技術發展現狀
近年來,大國之間的競爭加劇,電子戰領域也迎來了關鍵的轉型階段。2021年標志著美國在認知電子戰領域邁出了重要的一步。3月,美國空軍推出了一種有源/無源告警與生存系統,該系統將人工智能和機器學習技術整合進F-15“鷹”系列戰斗機,目的是在復雜的電磁環境中對抗新興威脅。6月,美國海軍的“下一代干擾機”項目實現了中波段干擾吊艙的飛行測試。緊接著,美國空軍對該項目中干擾吊艙的機載電子攻擊能力進行了評估,從多個角度分析了其實施的可能性。此外,美軍還對“猛虎II”電子戰系統進行了飛行測試,該系統主要部署在旋翼和固定翼飛機上,為作戰單位提供了關鍵的分布式、網絡化機載電子戰能力[4]。
全球電子戰發展歷程中,其他國家也發展迅速。俄羅斯已在實戰中部署了“克拉蘇哈”電子戰系統[5],此系統能夠執行對敵方通信網絡的大范圍、寬頻帶、高噪聲干擾任務。在偵測敵方目標飛行過程中,它同樣可作為防護系統使用。一旦截獲敵方的輻射信號,系統便能自動進行全程干擾,無需人工干預。它在認知電子戰領域中,是一款具有標志性的武器裝備。在俄軍中,另一種被廣泛認知的電子戰武器為“希比內”系統[6],此系統顯著的特性在于融合了先進的智能技術,不僅搭載了豐富的存儲應用資源,而且能夠根據作戰環境進行自我調整,集偵察、干擾、威脅評估等多項功能于一身。2021年3月,日本為其軍事戰斗單位引入了網絡電子戰系統,該系統的工作頻率范圍廣泛,包括了軍用衛星和雷達系統等關鍵頻率范圍,并具備電子支援和電子攻擊的功能。同年,歐盟委員會同樣推動了一系列電子戰項目的研發工作。“卡耳門塔”計劃采用了智能感知算法來增強飛行平臺的主動防護性能,推動了電子戰向智能化方向的發展[7]。
................................
第2章 相關理論及技術
2.1 雷達工作原理
雷達工作原理還得依據雷達的工作模式來展開:雷達的工作模式由其周邊條件與作戰需求共同作用決定。針對不同的探測目標和電磁背景,雷達會依照實際情況調整其工作模式。對于多功能雷達來說,其波形、相位以及能量分配的動態調整能力,使其任務適應性更強,工作模式轉換也更加多樣和精細。作為干擾方,要掌握雷達的工作模式,以便更有效地選擇干擾的類型和參數。基于上述情形,本部分將對典型工作模式展開簡要探討。
2.1.1 目標探測
雷達目標探測的核心工作是通過電磁波掃描實現目標定位。該模式通過定向發射探測波束并接收反射信號從而完成工作循環。當系統檢測到有效反射波時即判定存在目標物體,隨后通過信號解析可初步推算目標方位參數。為保證掃描有效性,需合理規劃雷達覆蓋區域,在保持設備性能的前提下盡可能擴展監測空間。
........................
2.2 有源干擾技術
干擾機制的分類通常基于信號源特性、作戰單元空間分布及作用原理等要素[50]。從對抗效果差異角度,主要存在兩種干擾類型:壓制干擾與欺騙干擾。
2.2.1 壓制干擾
壓制干擾無需掌握雷達系統參數即可實施有效對抗。該技術依托于主動發射寬譜噪聲或準噪聲波形,通過抬升本底噪聲電平使接收端信噪比急劇劣化,同時結合全頻段覆蓋優勢實現真實信號的遮蔽效應[51]。傳統的實施方法大多是利用噪聲對雷達波形在幅度、相位以及頻率域進行調制,而創新型壓制干擾策略則是引入目標回波與干擾信號在時域的卷積處理,以此來提高干擾的效能。下面是各類壓制式干擾技術的特征對比情況:
? 噪聲調幅干擾
噪聲調幅作用下的干擾信號呈現出較為十分突出的隨機特征,其幅值起伏比較大。即便干擾與回波的特征比較相近,可仍然很難徹底將真實目標掩蓋住,使得目標被識別的概率相對來說比較高。不過該技術有操作簡單以及適用性廣等優點。
? 噪聲調頻干擾
噪聲調頻干擾對于雷達系統有和距離相關的壓制特性。在遠距離的條件之下,這種干擾方式可有效地覆蓋目標回波信號。但隨著目標逐漸接近,因為回波功率和距離的四次方成反比這一物理特性,目標信號強度的增幅遠遠超過干擾功率,致使干擾壓制效果呈指數級衰減。此類干擾手段的有效作用區間主要存在于雷達探測的中遠距離段。
..........................
第3章 基于多策略融合麻雀搜索算法的干擾效果評估方法 ............ 29
3.1 干擾效果評估因素 ................................ 29
3.2 干擾效果評估算法 ........................... 32
第4章 基于啟發式自適應探索強化學習算法的戰情自適應干擾決策方法 ................................. 45
4.1 雷達干擾分析 .................................. 46
4.2 雷達干擾決策算法 ............................ 47
第5章 智能化雷達干擾系統的設計 ........................... 61
5.1 系統分析 ...................................... 61
5.1.1 系統目標 ............................ 61
5.1.2 系統需求 ......................... 62
第5章 智能化雷達干擾系統的設計
5.1 系統分析
5.1.1 系統目標
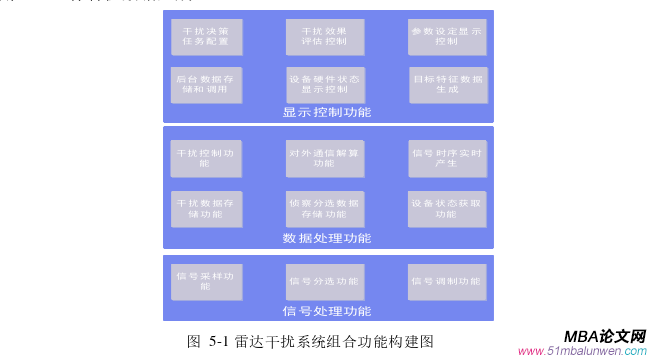
根據系統功能要求,該便攜式有源干擾機主要研制干擾主機(主控單元,數字處理單元、微波變頻單元和電源模塊)、功放單元、天線單元、射頻線纜和控制設備。
便攜式有源干擾機能夠偵收0.03~12GHz雷達信號,并對雷達信號進行偵察、分選、測量、識別、記錄、統計、干擾效果評估和顯示;同時,具備智能化干擾決策功能,可以根據偵收的信號快速引導產生相應雷達的干擾信號,并對雷達實施干擾。
同時系統設計時,需滿足應用操作界面友好,易于操作;具備系統狀態監測和故障診斷;具備數據記錄與存儲的需求。軟件要具備操作系統兼容性,以滿足不同的使用場景。信息安全方面,需考慮數據加密傳輸、用戶身份認證、操作權限管理等。
決策模擬論文參考
........................
第6章 總結及未來展望
在電子戰這個領域當中,干擾策略的制定對于戰斗的最終成敗有著直接的影響作用。要是能夠選擇出合適的干擾策略,那么便可提高戰斗效果,這對于獲取勝利來說是非常關鍵的一點。隨著雷達技術快速地向前發展,針對干擾多功能雷達的決策技術也就提出了更高的要求。干擾決策可被看成是一系列有連續性的決策過程,而強化學習,作為一種經典的控制以及決策算法,格外適用于干擾策略的規劃。本文所研究的主題以及創新點具體如下所示:
1、研究涉及多功能雷達的常規工作模式,剖析其運作機制以及參數特性。著重針對典型的有源干擾技術展開研究,分析干擾成效以及適用范圍。對主流干擾決策方法開展系統研究,探討群體智能優化算法在多功能雷達及認知電子戰應用中的局限性以及形成原因。
2、研究了影響雷達干擾效果評估的關鍵要素,還提出了一種基于TGSLS-SSA算法的雷達干擾效果評估方法,此方法通過把Tent混沌、黃金正弦以及萊維飛行相結合來改進SSA,接著運用TGSLS-SSA對SVM的參數給予優化,以此達成對雷達工作模式的實時辨別,按照其工作模式以及威脅程度動態評估干擾效果。在仿真過程中,把TGSLS-SSA和GA-SVM、SSA-SVM、PSO-SVM在識別雷達系統工作模式方面做了比較,結果說明TGSLS-SSA的識別準確率是最高的,能達到99.7%。
參考文獻(略)

